近日,國際儀器測量領域頂級期刊之一IEEE TRANSACTIONS ON INSTRUMENTATION AND MEASUREMENT(IF:5.332)上發表了電氣學院智能決策與控制技術研究團隊的最新研究成果Tactile Perception Information Recognition of Prosthetic Hand Based on DNN-LSTM。該成果是在李保江老師指導下完成,我校為唯一單位,第一作者為在讀碩士研究生柏基波,通訊作者為李保江老師。
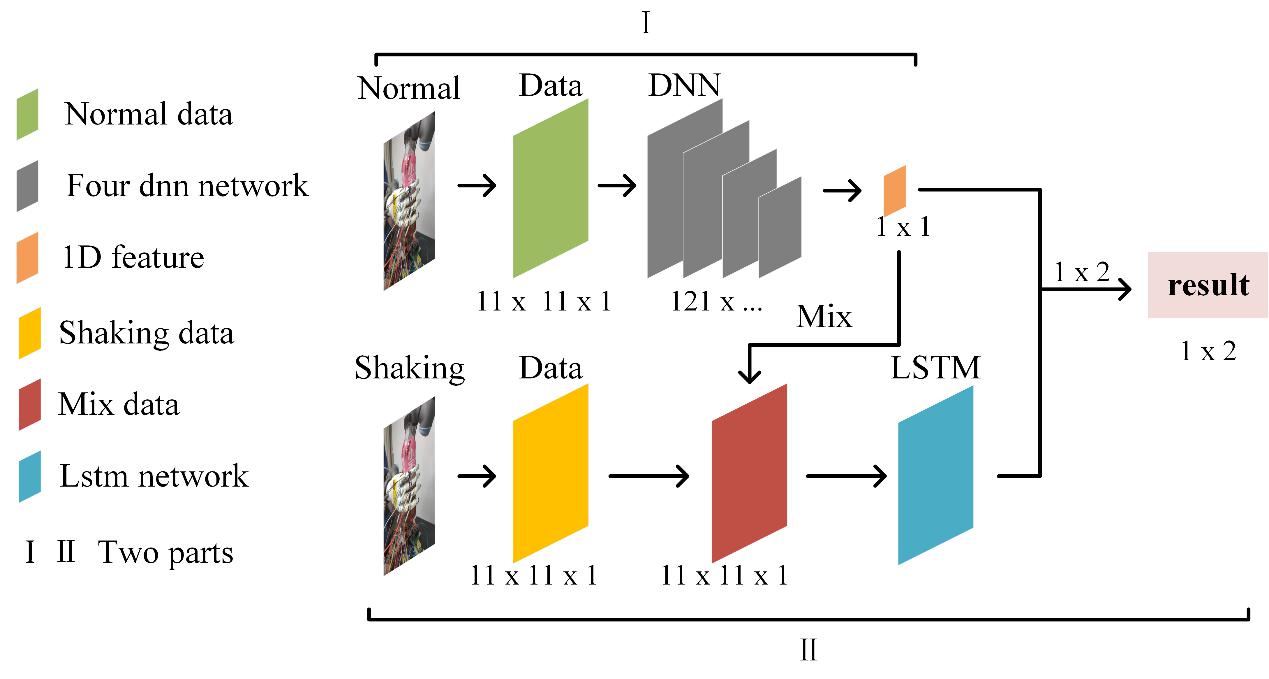
該研究詳細介紹了假手觸覺感知方面存在的問題,針對單一的傳感器無法獲得多種觸覺信息以及觸覺信息識別算法所面臨的問題,提出采用觸覺探索動作和基于D-LSTM的深度學習方法來對觸覺信息進行識別。結果表明,該論文中所采用的觸覺探索動作能夠使得單一觸覺感知源能夠獲取多種信息,且識別算法能夠有效的提升識別的精度,并具有較強的應用價值和前景。
電氣學院智能決策與控制技術研究團隊成立于2019年,主要圍繞基于多模態感知和多源生物電信號的控制技術,基于多傳感器信息融合的行為檢測、識別、跟蹤、預測等兩個研究方向開展科研研究。
近年來,學院不斷完善研究生培養體系,采取多項措施鼓勵研究生積極投入到學術研究,取得了顯著成效。學院將進一步加強研究生培養質量,引導和激勵導師團隊指導研究生圍繞前沿科學問題開展研究,切實提升科研創新能力,力爭取得更多高水平、有影響的標志性原創性科研成果。(電氣學院供稿)
論文鏈接:https://ieeexplore.ieee.org/document/9825704